Rajoitetun luiston tasauspyörästö (myös: rajoitettu liukuero (LSD), rajoitettu luisto , itselukittuva tasauspyörästö, rajoitettu liukuero ) on tasauspyörästö , jonka mekaniikka joidenkin pyörivien osien välisen rakenteellisesti lisääntyneen sisäisen vastuksen vuoksi mahdollistaa tasauspyörästö ilman ulkopuolisia ohjaustoimenpiteitä, jotka tasaavat itsenäisesti ajo- ja vetolenkkien kulmanopeudet niiden täydelliseen keskinäiseen lukitukseen ja koko tasauspyörästön muuntamiseen suoraksi voimansiirroksi.
On syytä muistaa, että englanninkielisessä kirjallisuudessa näistä eroista käytetään nimitystä "LSD (Limited-Slip Differential)", eli "rajoitettu liukuero" (slip), eikä tämä termi määrittele fyysistä toimintaperiaatetta. laitteessa, kitkan olemassaolo, vastus, mutta myös tasauspyörästön säädön olemassaolo / puuttuminen jne. Ainoastaan käyttölaitteiden kulmanopeuksien hallitsemattoman eron ("liukumisen") estämisellä on merkitystä. "Rajoitettu luisto" tarkoittaa yleensä tiettyä ennalta määrättyä kulmanopeuksien eron rajaa, jonka yläpuolella lukko alkaa toimia. Joissakin toteutuksissa lukitusta voidaan käyttää ennaltaehkäisevästi, eli jo ennen kuin akselin akseleilla on kulmanopeuksien eroa.
Rajoitetun sisäisen vastuksen tasauspyörästön (LDR) tärkein etu voidaan nähdä tarkastelemalla tavanomaista (tai "avointa") tasauspyörästöä, jossa yksi pyörä ei kosketa tietä lainkaan. Tässä tapauksessa tien kanssa kosketuksissa oleva toinen pyörä pysyy paikallaan ja ensimmäinen tiellä koskematon pyörä pyörii vapaasti - siirretty vääntömomentti on yhtä suuri molemmilla pyörillä, mutta ei ylitä vaaditun hetken kynnysarvoa ajoneuvon liikkeelle, joten ajoneuvo pysyy paikallaan. Asfalttiteillä ajavissa perinteisissä autoissa tämä tilanne on epätodennäköinen, ja siksi tällaisille autoille tavanomainen tasauspyörästö on varsin sopiva. Ajettaessa vaikeammissa olosuhteissa, kuten ajettaessa mudassa tai maastossa, näitä tilanteita tapahtuu, ja tasauspyörästön läsnäolo, jossa on lisääntynyt sisäinen vastus, mahdollistaa liikkeen pysäyttämisen. Rajoittamalla pyörien kulmanopeuksien eroa hyödyllistä momenttia välitetään niin kauan kuin ainakin toisella pyörästä on pitoa.
Estokerroin on minkä tahansa RPA:n tärkein arviointiominaisuus. RPA:ta käsittelevissä informaatiomateriaaleissa tämä kerroin voidaan ilmaista kahdella tavalla ja eroaa jonkin verran tulkinnan merkityksestä, vaikka molemmissa tapauksissa se tarkoittaa samaa asiaa, vain eri näkökulmista.
Ulkomaisessa teknisessä kirjallisuudessa KB ilmaistaan yleensä prosenttiarvona kymmeninä prosentteina välillä 20 % ja enemmän. Numero ilmaisee tietyn RPA:n kattamien pyörien/akseleiden välisen suhteellisen vääntömomentin jakauma-alueen leveyden erotuspyörään upotetusta staattisesta (sen mahdollisesta epäsymmetriasta korjattu) enimmäistasoon 100/0, jonka sisällä RPA voi tarjota keskinäistä estoa. Tämä määritelmä kuuluu englanninkielisen termin Locking Effect ("blokkiefekti") alle. Venäjänkielisessä teknisessä kirjallisuudessa KB ilmaistaan numerona kahdesta tai suuremmasta (yleensä ilman desimaalilukuja), mikä osoittaa pyörien / akseleiden vääntömomenttien (vetovoiman eron) suurimman mahdollisen eron, jonka sisällä tietty RPA voi tarjota keskinäisen eston. Tämä KB:n määritelmä vastaa englanninkielistä termiä Torque Bias ("torque shift").
Vaikka molemmat CB:n käsitteet sisältävät erilaisia laskentakaavoja, täysin mikä tahansa RPA voidaan arvioida oikein millä tahansa niistä. Samanaikaisesti kumpikin kahdesta KB-arvosta voidaan korreloida kokonaisestimaatti-indikaattorin kanssa, ja molempien arvojen välillä on aina yksi yhteen vastaavuus. Joten esimerkiksi arvot KB = 50% ja KB = 3 tarkoittavat samaa molemmissa tapauksissa: että RPA, jolla on määritetty KB, mahdollistaa vääntömomentin uudelleenjaon pyörien / akselien välillä suhteessa enintään 75/ 25, joka toisaalta antaa 50 % tehokkaasti käytetyn vääntömomentin (75-25=50) mahdollisesta uudelleenjakaumasta ja toisaalta antaa 3-kertaisen eron mahdollisessa vetovoimassa (75/25). =3). KB:n numeerinen (ei prosentuaalinen) arvo on ehkä tässä intuitiivisempi, varsinkin kun se merkitsee päämerkityksensä lisäksi samanlaista eroa pyörien / akselien sallitussa tarttumisvoimassa pintaan, joka samassa tapauksessa KB = 3 tarkoittaa, että moottoritehon maksimi Tehokas käyttö tällä RPA:lla on mahdollista vain, jos kunkin pyörän pitovoima tienpinnan kanssa eroaa enintään kolme kertaa.
Yksinkertainen (vapaa) tasauspyörästö ei anna sinun saada mitään eroa tehokkaasti käytetyissä vääntömomenteissa vetävissä nivelissä, täällä molempien pyörien / akselien vetovoiman välinen ero on käytännössä nolla kaikissa tiloissa, tällaisen tasauspyörästön KB on 0 % tai 1. Suora vaihteisto tai estetty tasauspyörästö mahdollistaa kaiken tehokkaasti käytetyn vääntömomentin toteuttamisen missä tahansa vetävässä nivelessä. Tässä mikä tahansa pyörä/akseli voi tarjota kaiken vetovoiman nollatasolla toiselle pyörälle/akselille, ja KB tässä tapauksessa on 100% tai ääretön.
RPA:lla voi olla kaksi ylempää KB-arvoa, yksi kullekin tehohaaralle. Tämä on mahdollista epäsymmetrisen eron tapauksissa, kun suunnittelutoimisto saa korjauksen epäsymmetrisyyteen - eli suunnittelutoimiston yläarvot kummallekin sivulle eroavat toisistaan suhteen erolla. käytetyistä vääntömomenteista (esimerkiksi GAZ-66-kuorma-auton epäsymmetrisessä takanokan poikkipyörän DPVS:ssä, joka hajottaa pyörien vääntömomentin suhteessa ≈(60/40), KB:n arvot oikealle ja vasemmat pyörät ovat 3.1 ja 2.1). Ja tämä on mahdollista symmetrisissä tasauspyörästöissä, kun se on rakenteellisesti sallittua lukitustoiminnan mekaniikalla (esim. symmetrisessä Torsen Type-1 RPAS:ssa KB:n eri arvot voidaan toteuttaa eri leikkauskulmilla kunkin satelliittivaihteistoparin hampaista).
Yleensä tietyn RPA:n CB on sen suurin CB. Samalla millä tahansa RPA:lla on ns. aloitusKB:n arvo, jota ei yleensä ilmoiteta.
Tämä termi tarkoittaa sisäisen vastuksen luomista RPA:ssa käytettyjen nivelten keskinäiselle pyörimiselle staattisesti, toisin sanoen ilman vääntömomenttia. Esikuormitustason arvo määräytyy voiman mukaan, joka tarvitaan minkä tahansa tasauspyörästön käyttämän linkin siirtämiseen (kiertämiseen) käyttölenkin ollessa paikallaan. Vapaassa tasauspyörästössä esijännitystaso on lähellä nollaa. Esijännitys, jos sellainen on, "toimii" aina riippumatta siitä, onko RPAS kuormitettu veto- tai jarrutusmomentilla vai ei. Esikuormituksen olemassaolo ei ole RPA:n toiminnan edellytys.
Niin sanottu "esijännityskytkin" tarkoittaa RPA:n sisällä tiettyä laitetta, joka suorittaa edellä mainitut toiminnot ja vaikeuttaa tasauspyörästöjen pyörimistä keskenään. Tämän laitteen suunnittelulla ei ole yleismaailmallista muotoa, ja se voi olla mikä tahansa eri RPA:ssa. Yleensä nämä ovat erimuotoisia välijousia, joita täydentävät välirenkaat.
Henkilöautoissa käytetään yleisesti kahta tyyppiä RPA:ta:
Molempien tyyppien differentiaalit sallivat jonkin rakenteellisesti ohjelmoidun eron vääntömomenttien (ensimmäisessä tapauksessa) tai kulmanopeuksien (toisessa tapauksessa) välillä, mutta asettavat mekaanisen rajoituksen suuren epäsuhtaisuuden esiintymiselle.
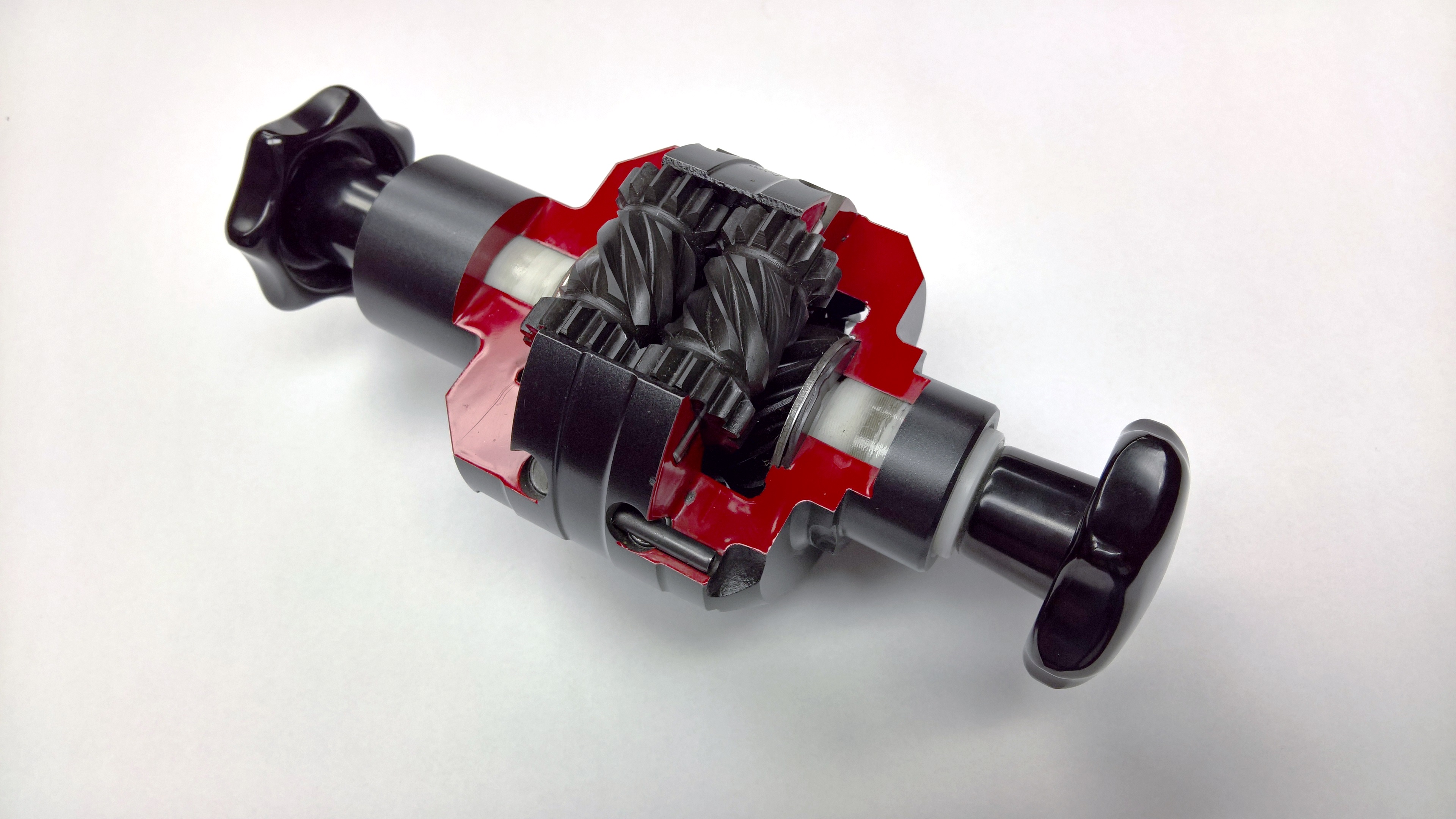
Rakenteellisesti ruuvilukitut differentiaalit voidaan valmistaa minkä tahansa litteän yksirivisen tai kaksirivisen SHS- tai SVE -mallien planeettamekanismin perusteella , jossa on satelliittien yhdensuuntaiset akselit, jotka puolestaan voivat olla joko yksittäisiä tai parillisia toisiinsa. Kaikille suorituksille on kaksi yhteistä ominaisuutta: sylinterimäisten kierrehammaspyörien käyttö kaikissa kytkentäpareissa ja todellisten satelliittiakseleiden puuttuminen osina. Kierukkahammaspyörää sinänsä ei käytetä tässä, ja yleisesti käytetty termi tulee yksinomaan tasauspyörästön hammaspyörien visuaalisesta samankaltaisuudesta ruuviin, erityisesti toisin kuin sen päävaihteet. Ja satelliittivaihteet eivät pyöri akseleilla, vaan tasauspyörästön koteloon/kannattimeen jyrsityissä sylinterimäisissä taskuissa. Ajatus lukituksesta perustuu siihen, että kierrevaihteistossa kuormituksen alaisena syntyy aksiaalivoimia, jotka pyrkivät työntämään molempia hammaspyöriä akseleillaan vastakkaisiin suuntiin kosketustasosta, ja tässä tätä ominaisuutta käytetään ensisijaisesti toisiinsa lukittujen satelliittien pareissa. , jotka saavat tätä varten jonkin verran aksiaalista liikkuvuutta. Vedon alaisena, kun pyörää käännetään tai luistaa, taskuihinsa kiilautuvat pyörivät satelliitit lepäävät tasauspyörästön kotelon päitä vasten, minkä ansiosta ne jarruttavat ja oikaisevat itse vetävien hammaspyörien kulmanopeuksia. Satelliittien kiilautuminen on sitä voimakkaampaa, mitä suurempi niiden välittämä vääntömomentti on, mutta itse estokerroin määräytyy kytkentähampaiden kaltevuuskulman ja satelliitin/kotelon kosketinparien kitkaominaisuuksien perusteella. Itsejarrutuksen tehostamiseksi näissä tasauspyörästöissä käytetään yleensä kolmea satelliittiparia enemmän kuin litteän planeettamekanismin vähimmäisvaatimus - nimittäin neljästä seitsemään paria. Kitkavaikutuksen tehostamiseksi satelliittien päiden kosketuspisteissä tasauspyörästön kotelon kanssa voidaan käyttää välilevyjä, jotka on valmistettu materiaalista, joka luo lisää vastustuskykyä kitkalle. Yksittäisten satelliittien tapauksessa tasauspyörästön toiminta on pohjimmiltaan samanlaista, sillä ainoana erona on, että tässä ei vain satelliitit, vaan myös tasauspyörästön keskivaihteet ovat mukana itsejarrutuksessa.
Koska kierrevaihteita voidaan käyttää minkä tahansa rakenteen ja muodon litteissä planeettavaihteissa, niihin perustuvia tasauspyörästöjä voidaan tehdä lähes millä tahansa välityssuhteella jokaiseen isäntä-orja-linkkipariin. Vastaavasti tällaiset tasauspyörästöt voivat olla sekä symmetrisiä että epäsymmetrisiä, ja niitä voidaan käyttää vaihteistossa sekä pyörien että akselien välisenä. Esikuormitusta käytetään aktiivisesti näissä tasauspyörästöissä, ja tässä estomomentti luodaan vetotilassa, vaikka lähdön kulmanopeuksissa ei olisi eroa. Mutta yksinomaan kierrevaihteistossa ei ole saatavilla korkeita lukituskertoimen arvoja (yleensä < 3), ja tehon parantamiseksi tällaisia tasauspyörästöjä voidaan täydentää kitkapakkauksilla, kuten levylukittuilla tasauspyörästöillä.
Ruuvilukkoiset tasauspyörästöt ovat nykyään hyvin yleisiä. Niiden pääsovellusalue on urheilu- ja kilpa-autot. Niitä käytetään myös virityksessä maantieautojen avoimuuden lievään parantamiseen. Todellisissa maastoajoneuvoissa niitä ei kuitenkaan yleensä käytetä. Tunnetuimmat näytteet ovat brittiläiseltä Quaife Engineeringiltä ja amerikkalaiselta Torsen NA Inc :ltä. . Ensimmäisessä tapauksessa differentiaalia kutsutaan - Quaife . Toisessa tapauksessa nämä ovat niin sanotut Torsen Type-2 ja Torsen Type-3 .
Rakenteellisesti kaikki matolukkotasauspyörästö on valmistettu SVS - järjestelmän yksinkertaisten spatiaalisten planeettamekanismien perusteella, joissa satelliitit ovat risteävillä akseleilla . Visuaalisesti aurinko-satelliitti-kytkentäparit näyttävät tässä kierukkavaihteelta , jossa kierukkapyörän ja itse maton akselit ovat myös kohtisuorassa toisiinsa nähden eivätkä leikkaa toisiaan. Sekä satelliitit että vetopyörät voivat toimia matona ja matopyöränä, ja on kehitetty matolukkoa, jossa on molemmat vaihtoehdot roolien jakamiseen vaihteiden välillä. Ajatus lukituksesta perustuu siihen, että kierukkavaihteelle on ominaista itsejarrutus tapauksissa, joissa voima ohjataan kierukkapyörästä matolle, joka on mitä vahvempi, sitä suurempi on kierukkahampaiden kaltevuuskulma. pyörimisakselilleen.
Vaikka matolukkotasauspyörästö tunnetaan parhaiten American Torsen NA Inc :n kehittämässä versiossa. , - ns. Torsen Type-1 - kehitysyhtiö itse jostain syystä välttelee termiä "matovaihde" erotuspyörästään kuvaillessaan. Vaihteisto tässä on julistettu kierteiseksi risteävillä akseleilla, mutta ei vain kierteittäin, vaan tietyllä, Torsenin itsensä kehittämällä ja patentoimalla Invex ™ -hammasmuodolla , joka on itse asiassa yksityinen versio kierteisestä vaihteistosta . Venäjänkielisessä tekniikan kirjallisuudessa uskotaan, että Torsen Type-1 :ssä matojen roolia ovat vetopyörät ja matopyörien roolia satelliitit. Selitys tälle johtuu pyörivien hammaspyörien ja satelliittien kierteisen leikkauksen erilaisesta kaltevuuskulmasta. Satelliitin epätavallinen kolmirivinen muoto, jossa on vetopyörästö reunoilla ja kierrevaihteisto keskellä, selittyy yksinomaan sillä, että risteävien akseleiden asettelun vuoksi on rakenteellisesti mahdotonta järjestää saman hammaspyörän kautta samanaikainen leikkaus. molempien satelliittien kytkeytyminen ajettujen vaihteiden kanssa ja satelliitit keskenään, ja tasauspyörästön sisäisen vastuksen lisäämiseksi tällä ominaisuudella ei ole merkitystä. Molemmissa käytetyissä vaihteissa on hampaiden samansuuntainen leikkaus ja pieni aksiaalinen liikkuvuus, mikä, kuten ruuvilukittujen tasauspyörästöjen tapauksessa, on välttämätöntä molempien vaihteiden siirtämiseksi akselia pitkin kuormitettuna, vain tässä tapauksessa ei kosketusta varten kotelo, mutta niiden keskinäinen itsejarrutus toisiaan, mikä edistää merkittävästi sisäisen vastuksen yleistä kasvua. Vääntöherkkä tasauspyörästö. Estokerroin eri versioissa on 3-6. Tasauspyörästö on visuaalisesti ja kinemaattisesti symmetrinen, ja akselien välisen tasauspyörästön tapauksessa sitä käytettiin AWD -autojen modifikaatioissa, alun perin etuvetoisissa. Yleensä Torsen Type-1 on yksi tunnetuimmista RPA-malleista. Sitä käytettiin laajasti eri vuosien WRC- ja Formula 1 -kilpa-autoissa sekä pyöränvälisenä että väliakselina. Ja maantieautoissa siitä on tullut täysin yksiselitteinen assosiaatio Audin - Quattron -nelivetojärjestelmien kanssa, vaikka Audi onkin käyttänyt muita vaihtoehtoja viimeaikaisessa kehityksessä. Maastoautojen joukossa tämän RPA:n tunnettu kantaja on Hummer H1 .
Todelliset matolukitut tasauspyörästöt korkealla (luokkaa 10 ja jopa korkeammalla) lukitussuhteella olivat amerikkalaisia ja saksalaisia malleja maastokuorma-autoihin. Tässä tapauksessa RPVS-planeettamekanismin suunnittelussa oletettiin kolminkertaisia toisiinsa lukittuja satelliitteja, joista kaksi oli matoja ja yksi oli matopyörä. Myös vetopyörät olivat kierukkapyöriä ja tasauspyörästössä oli yhteensä 8 kieroa ja 6 kierukkapyörää kahta kokoa. Tärkeimmät yritykset koskien näiden RPA-laitteiden massakäyttöä tapahtuivat sotaa edeltävinä vuosina. Neuvostoliitossa tämän tyyppistä RPA:ta testattiin sodan jälkeen sekä Rheinmetall-Borsig AG :n palkintojen muodossa että saksalaiseen malliin perustuvan "parannetun" suunnittelun kotikehityksen muodossa. Tietyistä amerikkalaisista ja saksalaisista kuljettajista ei ole saatavilla tietoja, vaikka matolukittujen tasauspyörästöjen uskotaan olleen yleisiä erilaisissa maasto- ja louhosautoissa ja traktoreissa. Neuvostoliitossa ainoa enemmän tai vähemmän massakantajia on Ural-375D . Nykyaikainen käyttö on luultavasti olematonta.
Rakenteellisesti levylukittu tasauspyörästö koostuu aina kartiovaihteiden SHS -järjestelmän planeettamekanismista , jota täydentää pari miniatyyrikartiokitkakytkimiä ja pari monilevyistä kitkapakettia, jotka sijaitsevat tasauspyörästön akselilla molemmilla puolilla. käytettävät vaihteet ja kotelo. Osa kitkalevyistä on kytketty tasauspyörästön koteloon ja osa miniatyyrikartionmuotoiseen kytkimeen, joka kumpikin on yhdistetty omaan käyttövaihteeseensa (aurinko). Ajatus lukituksesta perustuu siihen, että kuormituksen alaisena kartiohammaspyörissä syntyy aksiaalisia voimia, jotka pyrkivät työntämään hammaspyörät erilleen toisistaan, ja toisin kuin vapaassa tasauspyörästössä, jossa tätä vaikutusta yritetään tasoittaa, se on juuri siitä johtuen, että käyttövaihteiden väliset kitkapaketit puristuvat kokoon ja tasauspyörästön kotelo, mikä puolestaan johtaa kulmanopeuksien linjaamiseen. Kartiokytkimien ja kitkapakkausten lisäksi tässä käytetään usein tehon tehostamiseen välikejousta, joka on asennettu käyttövaihteiden väliin. Ja tehostamaan vaikutuksen, näissä differentiaaleissa ei yleensä ole kahta, vaan neljä satelliittia ristinmuotoisella kantoaaltimella.
Tällaisten erojen kehitys on ollut tiedossa sotaa edeltävältä ajalta - amerikkalaiset yritykset LeTurno-Westinghouse ja Borg Warner olivat mukana niissä. Tasauspyörästö sai nykyaikaisen ilmeensä ja levylukkonsa 60-luvulla, kun ilmaan tuli suhteellisen luotettavat kitkamateriaalit, joiden ansiosta koko järjestelmästä saatiin kompakti ja autoon sopiva. Nykyään niitä käytetään poikittaisakseleina sekä urheilu- että maastoajoneuvojen takavetoakseleissa. Luotettava, mutta saattaa vaatia säätöä ajan myötä.
Rakenteellisesti vaihtoehtoja on kaksi. Yhdessä tapauksessa nokkakytkin , joka koostuu kahdesta nokkalevystä ja välierottimesta , jossa on krakkaukset, sijaitsee vapaan tasauspyörästön molempien käyttövaihteiden välissä. Toisessa tapauksessa tasauspyörästön planeettavaihteella ei ole vaihteita: erotinrengas toimii tasauspyörästön ersatz-kannattimena, satelliitit ovat krakkereita ja käytettävien hammaspyörien roolia suorittaa kaksi nokkalevyä tai -rengasta. jossa on aaltoileva pinnan profiili, joka liittyy erottimeen. Molemmissa tapauksissa estämisen idea perustuu siihen, että tietyllä käyttölenkkien kulmanopeuksien erolla krakkarit kiilautuvat nokkalevyjen tai renkaiden väliin ja tukkivat tasauspyörästön lähes välittömästi. Tässä esto toimii vain kulmanopeuksien eroissa. Tiettyyn tämän eron arvoon asti tasauspyörästö toimii vapaana, sen saavuttaessa se lukittuu välittömästi, eikä sillä ole väliä onko se kuormitettu vääntömomentilla vai ei. Vapaan ja suljetun tilan välillä ei ole siirtymätilaa osittaiselle estolle.
Ensimmäinen tunnettu nokkatasauspyörästön kehittäjä on todennäköisesti Ferdinand Porsche . Juuri hänen tasauspyörästönsä meni sarjaan KdF-Kübelwagen- koneissa . Nykyään itselukkiutuvia nokkatasauspyörästöjä käytetään pääasiassa maastoajoneuvojen ja sotilasvarusteiden välisinä tasauspyörien välisinä tasauspyörinä (panssaroidut miehistönkuljetusalukset jne.).
Rakenteellisesti pallolukitut tasauspyörästöt ovat eräänlainen symmetrisen SHS -järjestelmän ersatz-planeettavaihteisto . Muodollisesti niissä ei ole vaihteita eikä satelliitteja, mutta itse asiassa niiden rakenneosien toiminnot ja yleinen toimintaperiaate ovat identtisiä minkä tahansa todellisen planeettatasauspyörästön suunnittelun ja toimintaperiaatteen kanssa, ja lukitusmekaniikka on määrätty. lisäämällä sisäistä työvastusta, kuten muissa itselukittuvissa tasauspyörästöissä. Satelliittien roolissa käytetään täällä palloja, jotka on tiiviisti pakattu tasauspyörästön kotelossa (kannattimessa) oleviin silmukkaisiin uriin ja jotka, kuten todelliset satelliitit, koskettavat samanaikaisesti toisiaan ja parin ohjattua ersatz-vaihteistoa (kaksi) auringot). Pienellä kulmanopeuksien erolla pallot, työntäen toisiaan, liikkuvat silmukkaurassa yhteen tai toiseen suuntaan, mikä tarjoaa koko rakenteen differentiaalisen pyörimisen. Kun vedettyjen hammaspyörien kulmanopeuksissa (luistossa) saavutetaan tietty taso, pallot eivät pysty ylläpitämään sitä (eroa), vaan ne jarruttavat itse kitkan vuoksi urissaan ja aiheuttavat siten estovaikutuksen.
Tämä malli on vähän tunnettu globaalissa autoteollisuudessa ja sen jakelu rajoittuu todennäköisesti Venäjälle ja Ukrainaan. Kuuluisimmat pallolukitut tasauspyörästöt ovat Krasikov-automaattinen tasauspyörästö ja Nesterovin automaattinen tasauspyörästö.
Rakenteellisesti tasauspyörästö koostuu yksinkertaisesta planeettamekanismista, joka koostuu täysin mistä tahansa piiristä ja viskoosista kytkimestä , joka yhdistää mitkä tahansa kaksi sen lenkkiä (mikä tahansa kaksi virtalähde-/irrotusakselia). Viskoosi kytkin voi sijaita sekä tasauspyörästön sisällä ja yhdistää kaksi käytettävää lenkkiä tai ulkopuolella ja yhdistää käyttö- ja vetolenkit (viskoosin kytkimen sijainti ei vaikuta koko järjestelmän perustoimintaan). Ajatus tukkeutumisesta perustuu viskoosin kytkimen ominaisuuksiin tasaamaan sen kahden linkin kulmanopeudet laajentavan nesteen ominaisuuksien vuoksi. Lukitus laukaistaan vain kulmanopeuksien erosta. 100 % esto on sallittu lyhyen aikaa. Myös siirtymätiloja käytetään aktiivisesti.
Viskoosit RPA:t ovat vähemmän tehokkaita kuin edellä mainitut mekaaniset RPA:t, koska ne haihduttavat energiaa. Erityisesti mikä tahansa pysyvä kuormitus, joka lämmittää nestettä kytkimen sisällä, johtaa pysyvään pysyvään "differentiaalivaikutuksen" menettämiseen. [yksi]
Tätä RPA:ta ei pidä sekoittaa viskoosin kytkimen käyttöön niin kutsutuissa nelivetojärjestelmissä on demand .
Tämän tyyppisissä tasauspyörästöissä gerotoripumpun runko pyörii toisella puolella ja toisella puolella pumpun sisällä olevaan hammaspyörään yhdistetty akseli. Kun kotelon ja vaihteiston pyörimistaajuuksissa on eroa, pumppu puristaa käyttönesteen pumpun sisäontelossa. Tämä varmistaa vääntömomentin siirtymisen koneen pyörään, jolla on vahvempi pito. Pumppupohjaisissa järjestelmissä on ylä- ja alapainerajat sekä sisäinen vaimennus hystereesin välttämiseksi . Uusimmissa gerotor-pumpuilla varustetuissa järjestelmissä on tietokoneohjattu teho, mikä lisää liikkuvuutta ja eliminoi värähtelyjä.
Autojen elektronisten järjestelmien kehitys on mahdollistanut akselien akselien lukituksen ohjaamisen elektronisilla ohjausyksiköillä (ECU). Nämä järjestelmät käyttävät välttämättä erilaisia antureita.
Ensimmäinen askel oli lukkiutumattomien pyörien (ABS) antureiden avulla määrittämään liukuvien pyörien kulmanopeusero ja sitten pakotettu jarrujärjestelmän käyttö hidastamaan yksitellen pyörän pyörimistä liian suurella nopeudella - ja, jakaa siten momentti uudelleen vastakkaiseen pyörään vapaan tasauspyörästön kautta. Itselukittuvan tasauspyörästön toimintaa tällaisissa ajoneuvoissa jäljitellään, tasauspyörästö itse pysyy klassisen vapaana, ja siksi tällainen ratkaisu on melko halpa, ei heikennä auton parametreja eikä vaadi erityistä huoltoa. Tällaisia järjestelmiä on kutsuttu yhteisesti " liukumisenestoksi ". Itse asiassa ne ovat edistyneempi versio ABS-järjestelmästä, joka ei toimi vain jarrutuksen aikana, vaan myös liikkeen ja kiihdytyksen aikana. Käytetään myös osana globaalimpaa järjestelmää auton korin "vakauttamiseen" tiellä luistoolosuhteissa. Näitä järjestelmiä rajoittaa kuitenkin jarrujärjestelmän suorituskyky, ja ne ovat alttiita ylikuumenemiselle jatkuvassa käytössä ja siitä johtuvalle tehokkuuden heikkenemiselle. Täydellisissä maastoajoneuvoissa ei yleensä käytetä.
Toisessa vaiheessa otettiin käyttöön elektroniset ohjausjärjestelmät, joissa kullekin akselille on toteutettu kitkakytkimet. Tällaiset kytkimet voivat olla auki ajettaessa suunnilleen yhtäläisillä kulmanopeuksilla tai päinvastoin kiinni jatkuvaa vääntömomentin siirtoa varten FullTime 4WD:n tapaan, mutta kun elektroniikka määrittää luistotilanteen ja myös sen estämiseksi, tarvittavat kytkimet vähenevät. lasketulla voimalla siirtää enemmän vääntömomenttia vähemmän liikkuvalle akselille. Sitä käytetään esimerkiksi Haldex-4, VTM-4 järjestelmissä. Ne voidaan toteuttaa sekä sähkökytkimien että hydraulisten kytkimien avulla, joihin käytetään sähköpumppua.
Kolmas vaihe tällaisten erojen kehityksessä on ns. " aktiiviset tasauspyörästöt ", joissa vääntömomentin syötön estämisen sijaan käytetään jatkuvaa työntövoiman jakautumisen säätöä akselin akselien välillä. Useissa toteutuksissa, kuten Honda SH-AWD:ssä, takatasauspyörästö toteutetaan vain toiminnallisesti, ilman klassisinta tasauspyörästön mekaniikkaa, ja se on täysin riippuvainen pidon ja takapyörän nopeuden elektronisesta ohjauksesta. Tällöin koko tälle akselille välittyvä momentti käytetään, ilman jarrutushäviöitä, se jaetaan vain vähemmän luistavaa akselia kohti. Samaan aikaan on mahdollista lisätä ohjattavuutta kääntyessä, koska lisääntynyt vääntömomentti siirtyy ulkoisen akselin akseliin ja jopa normaalia suuremmalla kulmanopeudella, johtuen vaihteistosta, jossa on lisänumero. Jos jokin tällaisten järjestelmien käyttämistä antureista epäonnistuu, akselin vetovoima pysähtyy tai toiminnallisuus heikkenee. Järjestelmä voi myös sammua itsestään esimerkiksi ylikuumeneessaan.
{kind=link}
{kind=link}
{kind=link}