Hitausmomentti
Kokeneet kirjoittajat eivät ole vielä tarkistaneet sivun nykyistä versiota, ja se voi poiketa merkittävästi 24. joulukuuta 2020 tarkistetusta versiosta . tarkastukset vaativat 6 muokkausta .| Hitausmomentti | |
|---|---|
| Ulottuvuus | L 2 M |
| Yksiköt | |
| SI | kg m² _ _ |
| GHS | g cm² _ _ |

Hitausmomentti on skalaarinen fysikaalinen suure , hitausmitta pyörivässä liikkeessä akselin ympäri, aivan kuten kappaleen massa on sen inertian mitta translaatioliikkeessä. Sille on ominaista massojen jakautuminen kehossa: hitausmomentti on yhtä suuri kuin perusmassojen tulojen ja niiden etäisyyksien neliö perusjoukosta (piste, viiva tai akseli).
Kansainvälisen yksikköjärjestelmän (SI ) mittayksikkö : kg m² .
Nimitys : I tai J.
Hitausmomentteja on useita - riippuen perusjoukon tyypistä, johon etäisyydet alkuainemassoista mitataan.
Aksiaalinen hitausmomentti
Mekaanisen järjestelmän hitausmomentti suhteessa kiinteään akseliin ("aksiaalinen hitausmomentti") on J a :n arvo, joka on yhtä suuri kuin järjestelmän kaikkien n aineellisen pisteen massojen ja järjestelmän neliöiden tulojen summa. niiden etäisyydet akseliin [1] :

missä:
- m i on i :nnen pisteen massa,
- r i on etäisyys i : nnestä pisteestä akseliin.
Kappaleen aksiaalinen hitausmomentti J a on kappaleen hitausmitta pyörivässä liikkeessä akselin ympäri, aivan kuten kappaleen massa on sen hitausmitta translaatioliikkeessä .

missä:
dm = ρ dV on kappaleen pienen tilavuuselementin massa dV , ρ on tiheys, r on etäisyys elementistä dV akseliin a .Jos kappale on homogeeninen, eli sen tiheys on sama kaikkialla

Huygens-Steinerin lause
Jäykän kappaleen hitausmomentti suhteessa mihin tahansa akseliin riippuu kappaleen massasta , muodosta ja koosta sekä kappaleen asennosta tähän akseliin nähden. Huygensin-Steinerin teoreeman mukaan kappaleen J hitausmomentti mielivaltaisen akselin ympäri on yhtä suuri kuin tämän kappaleen hitausmomentin summa J c akselin suhteen, joka kulkee kappaleen massakeskipisteen kautta yhdensuuntaisena. tarkasteltuna akselina ja kehon massan m tulo kertaa akselien välisen etäisyyden d neliö [1] :

missä m on kappaleen kokonaismassa.
Esimerkiksi tangon hitausmomentti sen pään läpi kulkevan akselin ympäri on:

Joidenkin kappaleiden aksiaaliset hitausmomentit
| Runko | Kuvaus | a -akselin sijainti | Hitausmomentti J a |
|---|---|---|---|
| Materiaalin massapiste m | Etäisyydellä r pisteestä, kiinteä | ||
| Ontto ohutseinäinen sylinteri tai rengas, jonka säde on r ja massa m | Sylinterin akseli | ||
| Kiinteä sylinteri tai kiekko, jonka säde on r ja massa m | Sylinterin akseli | ||
| Ontto paksuseinäinen sylinteri, jonka massa on m , ulkosäde r 2 ja sisäsäde r 1 | Sylinterin akseli | [Yhteys 1] | |
| Kiinteä sylinteri, jonka pituus on l , säde r ja massa m | Akseli on kohtisuorassa sylinterin generatrixiin nähden ja kulkee sen massakeskuksen läpi | ||
| Ontto ohutseinäinen sylinteri (rengas), jonka pituus on l , säde r ja massa m | Akseli on kohtisuorassa sylinteriin nähden ja kulkee sen massakeskipisteen läpi | ||
| Suora ohut sauva pituus l ja massa m | Akseli on kohtisuorassa sauvaan nähden ja kulkee sen massakeskipisteen läpi | ||
| Suora ohut sauva pituus l ja massa m | Akseli on kohtisuorassa tankoon nähden ja kulkee sen pään läpi | ||
| Ohutseinämäinen pallo, jonka säde on r ja massa m | Akseli kulkee pallon keskustan läpi | ||
| Pallo, jonka säde on r ja massa m | Akseli kulkee pallon keskustan läpi | ||
| Kartio, jonka säde on r ja massa m | kartioakseli | ||
| Tasakylkinen kolmio, jonka korkeus h , kanta a ja massa m | Akseli on kohtisuorassa kolmion tasoon nähden ja kulkee kärjen läpi (korkeudessa) | ||
| Säännöllinen kolmio, jonka sivu on a ja massa m | Akseli on kohtisuorassa kolmion tasoon nähden ja kulkee massakeskipisteen läpi | ||
| Neliö, jonka sivu on a ja massa m | Akseli on kohtisuorassa neliön tasoon nähden ja kulkee massakeskuksen läpi | ||
| Suorakaide, jonka sivut a ja b ja massa m | Akseli on kohtisuorassa suorakulmion tasoon nähden ja kulkee massakeskipisteen läpi | ||
| Säännöllinen n-kulmio, jonka säde on r ja massa m | Akseli on kohtisuorassa tasoon nähden ja kulkee massakeskipisteen läpi | ||
| Torus (ontto) , jonka ohjausympyrän säde R , generatrixin säde r ja massa m | Akseli on kohtisuorassa toruksen ohjausympyrän tasoon nähden ja kulkee massakeskuksen läpi |














![{\displaystyle {\frac {mr^{2}}{6}}\left[1+2\cos(\pi /n)^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6bf60937eb16b822e5b6212250fa8f13c794f3cb)

Kaavojen johtaminen
Ohutseinäinen sylinteri (rengas, vanne)
Kaavan johtaminenKappaleen hitausmomentti on yhtä suuri kuin sen osien hitausmomenttien summa. Jaetaan ohutseinäinen sylinteri elementeiksi, joiden massa on dm ja hitausmomentti dJ i . Sitten

Koska ohutseinäisen sylinterin kaikki elementit ovat samalla etäisyydellä pyörimisakselista, kaava (1) muunnetaan muotoon

Paksuseinämäinen sylinteri (rengas, vanne)
Kaavan johtaminenOlkoon homogeeninen rengas, jonka ulkosäde R , sisäsäde R 1 , paksuus h ja tiheys ρ . Halkaistaan se ohuiksi renkaiksi, joiden paksuus on dr . Ohuen renkaan, jonka säde on r , massa ja hitausmomentti ovat

Löydämme paksun renkaan hitausmomentin integraalina


Koska renkaan tilavuus ja massa ovat yhtä suuret

saamme lopullisen kaavan renkaan hitausmomentille

Homogeeninen levy (kiinteä sylinteri)
Kaavan johtaminenKun otetaan huomioon sylinteri (kiekko) renkaana, jonka sisäsäde on nolla ( R 1 = 0 ), saadaan kaava sylinterin (levyn) hitausmomentille:

kiinteä kartio
Kaavan johtaminenJaetaan kartio ohuiksi kiekoiksi, joiden paksuus on dh kohtisuorassa kartion akseliin nähden. Tällaisen levyn säde on

missä R on kartion kannan säde, H on kartion korkeus, h on etäisyys kartion yläosasta kiekkoon. Tällaisen kiekon massa ja hitausmomentti ovat


Integroimalla saamme

Kiinteä yhtenäinen pallo
Kaavan johtaminenJaetaan pallo ohuiksi kiekoiksi, joiden paksuus on dh kohtisuorassa pyörimisakseliin nähden. Tällaisen levyn säde, joka sijaitsee korkeudella h pallon keskustasta, löytyy kaavasta

Tällaisen kiekon massa ja hitausmomentti ovat

Pallon hitausmomentti löydetään integroimalla:

ohutseinäinen pallo
Kaavan johtaminenJohtamiseksi käytämme kaavaa homogeenisen pallon hitausmomentille, jonka säde on R :

Lasketaan kuinka paljon pallon hitausmomentti muuttuu, jos vakiotiheydellä ρ sen säde kasvaa äärettömän pienellä arvolla dR .

Ohut sauva (akseli kulkee keskustan läpi)
Kaavan johtaminenJaetaan sauva pieniksi paloiksi, joiden pituus on dr . Tällaisen fragmentin massa ja hitausmomentti on

Integroimalla saamme

Ohut sauva (akseli kulkee pään läpi)
Kaavan johtaminenKun pyörimisakselia siirretään tangon keskeltä sen päähän, tangon painopiste siirtyy suhteessa akseliin etäisyyden l ⁄ 2 . Steinerin lauseen mukaan uusi hitausmomentti on yhtä suuri kuin
Planeettojen ja niiden satelliittien dimensioimattomat hitausmomentit [2] [3] [4]
Planeettojen ja satelliittien ulottumattomat hitausmomentit
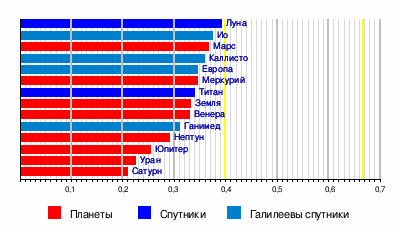
Planeettojen ja niiden satelliittien sisäisen rakenteen tutkimuksessa suuri merkitys on niiden ulottumattomilla hitausmomentilla. Kappaleen, jonka säde on r ja massa m , dimensioton hitausmomentti on yhtä suuri kuin sen pyörimisakselin ympärillä olevan hitausmomentin suhde saman massaisen materiaalipisteen hitausmomentiin kiinteän pyörimisakselin ympärillä, joka sijaitsee etäisyys r (yhtä kuin mr 2 ). Tämä arvo heijastaa massan jakautumista syvyydessä. Yksi menetelmistä sen mittaamiseksi planeetoille ja satelliiteille on määrittää Doppler -siirtymä radiosignaalista, jonka AMS lähettää tietyn planeetan tai satelliitin ympäri. Ohutseinämäisellä pallolla dimensioton hitausmomentti on 2/3 (~0,67), homogeenisella pallolla se on 0,4 ja yleensä mitä pienempi, sitä suurempi kappaleen massa keskittyy sen keskustaan. Esimerkiksi Kuun dimensioton hitausmomentti on lähellä 0,4 (0,391), joten sen oletetaan olevan suhteellisen homogeeninen, sen tiheys muuttuu vähän syvyyden mukaan. Maan dimensioton hitausmomentti on pienempi kuin homogeenisen pallon (0,335), mikä on argumentti tiheän ytimen olemassaolon puolesta [5] [6] .
Keskipakohitausmomentti
Kappaleen keskipakohitausmomentit suorakulmaisen suorakulmaisen koordinaattijärjestelmän akseleiden suhteen ovat seuraavat suureet [1] [7] :



missä x , y ja z ovat kappaleen pienen elementin koordinaatit tilavuudella dV , tiheydellä ρ ja massalla dm .
Akselia OX kutsutaan kappaleen päähitausakseliksi , jos keskipakohitausmomentit J xy ja J xz ovat samanaikaisesti nolla. Kolme päähitausakselia voidaan vetää jokaisen kappaleen pisteen läpi. Nämä akselit ovat keskenään kohtisuorassa toisiinsa nähden. Kappaleen hitausmomentteja suhteessa kolmeen päähitausakseliin, jotka on piirretty kappaleen mielivaltaiseen pisteeseen O , kutsutaan tämän kappaleen päähitausmomenteiksi [7] .
Kappaleen massakeskipisteen kautta kulkevia päähitausakseleita kutsutaan kappaleen päähitausakseleiksi ja näiden akseleiden ympärillä olevia hitausmomentteja sen päähitausmomenteiksi . Homogeenisen kappaleen symmetria-akseli on aina yksi sen päähitausakseleista [7] .
Geometriset hitausmomentit
Tilavuuden geometrinen hitausmomentti suhteessa akseliin on kappaleen geometrinen ominaisuus, joka ilmaistaan kaavalla [8] :

missä, kuten aiemmin, r on etäisyys elementistä dV akseliin a .
J Va :n mitta on vastaavasti pituus viidenteen potenssiin ( ), SI-yksikkö on m 5 .

Alueen geometrinen hitausmomentti suhteessa akseliin on kappaleen geometrinen ominaisuus, joka ilmaistaan kaavalla [8] :

jossa integrointi suoritetaan pinnan yli, S ja dS on tämän pinnan elementti.
J Sa :n mitta on vastaavasti pituus neljänteen potenssiin ( ), SI-yksikkö on m 4 . Rakennuslaskelmissa, kirjallisuudessa ja valssatun metallin lajitelmissa se ilmoitetaan usein cm 4 :nä .

Alueen geometrisen hitausmomentin kautta ilmaistaan leikkausvastuksen momentti :

Tässä r max on suurin etäisyys pinnasta akseliin.
| Joidenkin kuvioiden alueen geometriset hitausmomentit | |
|---|---|
| Suorakulmion korkeus ja leveys : |
|
| Suorakaiteen muotoinen laatikkoosa, jonka korkeus ja leveys ulkoreunoilla ja , sekä sisä- ja vastaavasti |
|
| Ympyrän halkaisija | |










Hitausmomentti koneesta
Jäykän kappaleen hitausmomenttia tiettyyn tasoon nähden kutsutaan skalaariarvoksi, joka on yhtä suuri kuin kappaleen kunkin pisteen massan ja tästä pisteestä tarkasteltavaan tasoon olevan etäisyyden neliön tulojen summa [9 ] .
Jos piirrämme koordinaattiakseleita mielivaltaisen pisteen läpi , hitausmomentit suhteessa koordinaattitasoihin ja ilmaistaan kaavoilla :








Kiinteän kappaleen tapauksessa summaus korvataan integraatiolla.
Keskeinen hitausmomentti
Keskihitausmomentti ( hitausmomentti pisteessä O, hitausmomentti navan ympärillä, napahitausmomentti ) on lausekkeella [9] määritelty suure :

missä:
- on kehon pienen tilavuuselementin massa ,
- - tiheys,
- on etäisyys elementistä pisteeseen O.




Keskeinen hitausmomentti voidaan ilmaista aksiaalisten päähitausmomenttien kautta sekä tasoihin liittyvien hitausmomenttien kautta [9] :


Inertian tensori ja inertian ellipsoidi
Kappaleen hitausmomentti mielivaltaisen akselin ympärillä, joka kulkee massakeskipisteen kautta ja jolla on yksikkövektorin antama suunta, voidaan esittää neliöllisenä (bilineaarisena) muotona :
(yksi)

missä on inertiatensori . Inertiatensorimatriisi on symmetrinen, sillä on mitat ja se koostuu keskipakoismomenttikomponenteista:





Valitsemalla sopiva koordinaattijärjestelmä inertiatensorin matriisi voidaan pienentää diagonaalimuotoon. Tätä varten sinun on ratkaistava tensorimatriisin ominaisarvoongelma :


missä on ortogonaalinen siirtymämatriisi inertiatensorin ominaiskantaan. Koordinaattiakselit suuntautuvat omassa periaatteessaan inertiatensorin pääakseleita pitkin ja ovat myös yhtäpitäviä inertiatensoriellipsoidin pääpuoliakseleiden kanssa. Suuret ovat päähitausmomentteja. Lauseke (1) on omassa koordinaattijärjestelmässään muodossa:



mistä saadaan ellipsoidin yhtälö ominaiskoordinaateissa. Jakamalla yhtälön molemmat puolet arvolla


ja vaihtojen tekeminen:

saamme ellipsoidiyhtälön kanonisen muodon koordinaatteina :


Etäisyys ellipsoidin keskustasta joihinkin sen pisteisiin liittyy kappaleen hitausmomentin arvoon ellipsoidin keskustan ja tämän pisteen läpi kulkevaa suoraa pitkin:

Katso myös
- Jäykän kappaleen kinematiikka
- Pääkomponenttimenetelmä
- Materiaalinen kestävyys
- Steinerin lause
- Königin lause (mekaniikka)
- Kolmoisintegraalin mekaaniset sovellukset
- Kaksoisintegraalin mekaaniset sovellukset
- Napainen hitausmomentti
- Lista hitausmomenteista
- Voiman hetki
- kulmamomentti
Kommentit
- ↑ "+"-merkin oikea käyttö tässä kaavassa voidaan varmistaa vertaamalla onttojen paksuseinäisten ja umpinaisten sylinterien hitausmomentteja, joilla on sama massa. Itse asiassa ensimmäisen näistä sylintereistä massa keskittyy keskimäärin kauempana akselista kuin toinen, ja siksi tämän sylinterin hitausmomentin on oltava suurempi kuin kiinteän sylinterin. Tämä hitausmomenttien suhde antaa "+"-merkin. Toisaalta rajassa, koska r 1 pyrkii r 2 :een, paksuseinämäisen onton sylinterin kaavan tulisi olla samassa muodossa kuin ohutseinäisen onton sylinterin kaavan. Ilmeisesti tällainen siirtymä tapahtuu vain käytettäessä kaavaa "+"-merkillä.
Muistiinpanot
- ↑ 1 2 3 Targ S. M. Hitausmomentti // Physical Encyclopedia / Ch. toim. A. M. Prokhorov . - M .: Suuri venäläinen tietosanakirja , 1992. - T. 3. - S. 206-207. — 672 s. - 48 000 kappaletta. — ISBN 5-85270-019-3 .
- ↑ Planetary Fact Sheet . Haettu 31. elokuuta 2010. Arkistoitu alkuperäisestä 14. maaliskuuta 2016.
- ↑ Showman, Adam P.; Malhotra, Renu. Galilean satelliitit // Tiede . - 1999. - Voi. 286 , nro. 5437 . - s. 77-84 . - doi : 10.1126/tiede.286.5437.77 . — PMID 10506564 .
- ↑ Margot, Jean-Luc; et ai. Merkuriuksen hitausmomentti spin- ja painovoimatiedoista // Journal of Geophysical Research : päiväkirja. - 2012. - Vol. 117 . - doi : 10.1029/2012JE004161 .
- ↑ Galkin I.N. Maan ulkopuolinen seismologia. — M .: Nauka , 1988. — S. 42-73. — 195 s. - ( Planeetta Maa ja maailmankaikkeus ). – 15 000 kappaletta. — ISBN 502005951X .
- ↑ Panteleev V. L. Maan ja planeettojen fysiikka. Ch. 3.4 - Planeetan painovoimakenttä . Haettu 31. elokuuta 2010. Arkistoitu alkuperäisestä 3. lokakuuta 2013.
- ↑ 1 2 3 Targ S. M. Lyhyt kurssi teoreettisesta mekaniikasta. - M . : " Higher School ", 1995. - S. 269-271. — 416 s. — ISBN 5-06-003117-9 .
- ↑ 1 2 Buchholz N. N. Teoreettisen mekaniikan pääkurssi. - 4. painos - M . : " Nauka ", 1966. - T. 2. - S. 131.
- ↑ 1 2 3 Yablonsky A. A. Dynamiikka // Teoreettisen mekaniikan kurssi. - 3. painos - M . : " Higher School ", 1966. - T. II. - S. 102-103. — 411 s.
Kirjallisuus
- Matveev. A. N. Mekaniikka ja suhteellisuusteoria. Moskova: Korkeakoulu, 1986
- Trofimova T. I. Fysiikan kurssi. - 7. painos - M .: Korkeakoulu, 2001. - 542 s.
- Aleshkevich V. A., Dedenko L. G., Karavaev V. A. Rigid Body Mechanics. Luennot. Arkistokopio , joka on päivätty 7. tammikuuta 2014 Moskovan valtionyliopiston fysiikan tiedekunnan Wayback Machine Publishing Housessa, 1997.
- Pavlenko Yu. G. Luennot teoreettisesta mekaniikasta. M.: FIZMATLIT, 2002. - 392s.
- Yavorsky B. M. , Detlaf A. A. Fysiikka lukiolaisille ja yliopistoihin tuleville: oppikirja - M .: Bustard, 2002, 800s. ISBN 5-7107-5956-3
- Sivukhin DV Yleinen fysiikan kurssi. 5 nidettä Osa I. Mekaniikka. 4. painos Moskova: FIZMATLIT; MIPT Publishing House, 2005. - 560 s.
- Belyaev N. M. Materiaalien lujuus. Kustantajan "Nauka" fysiikan ja matemaattisen kirjallisuuden pääpainos, 1976. - 608 s.
Linkit
| | |
|---|---|
| Sanakirjat ja tietosanakirjat |
|
| Bibliografisissa luetteloissa |
|