Mars-3
Vakaa versio kirjattiin ulos 17.8.2022 . Malleissa tai malleissa on vahvistamattomia muutoksia .| Mars-3 | |
|---|---|
| Valmistaja | NPO heitä. Lavochkin |
| Operaattori | Neuvostoliiton avaruusohjelma |
| Tehtävät | Marsin tutkiminen kiertoradalta ja pinnalta |
| Satelliitti | Mars |
| laukaisualusta | Baikonur |
| kantoraketti | Proton-K / Blok D |
| tuoda markkinoille | 28. toukokuuta 1971 18:26:30 MSK |
| Astumassa kiertoradalle | marraskuuta 1971 |
| Deorbit | 23. elokuuta 1972 |
| COSPAR-tunnus | 1971-049A |
| SCN | 05252 |
| Tekniset tiedot | |
| Paino | 4625 kg (kiertorata-asema: 3625 kg, automaattinen Mars-asema: 355 kg) |
| Orbitaaliset elementit | |
| Epäkeskisyys | 0,95548 |
| Mieliala | 60° |
| Kiertojakso | 12,79 päivää |
| pistekeskus | 211 400 km |
| perikeskus | 1500 km |
| Laskeutuminen taivaankappaleelle |
2. joulukuuta 1971 13:52 UTC |
| Laskeutumiskoordinaatit | 45°S sh. 158°W / 45 ° S sh. 158°W d. / -45; -158 |
| Mediatiedostot Wikimedia Commonsissa | |
"Mars-3" on Neuvostoliiton automaattinen planeettojenvälinen asema (AMS) Marsin avaruusohjelman neljännen sukupolven aikana . Yksi kolmesta M-71-sarjan AMC:stä. Mars-3-asema on suunniteltu tutkimaan Marsia sekä kiertoradalta että suoraan planeetan pinnalla. AMS koostui kiertorata-asemasta - keinotekoisesta Marsin satelliitista ja laskeutuvasta ajoneuvosta , jossa oli automaattinen Marsin asema.
Maailman ensimmäinen laskeutumisajoneuvon pehmeä lasku Marsiin ja ainoa Neuvostoliiton kosmonautiikassa [1] . Tiedonsiirto automaattiselta Marsin asemalta alkoi 1,5 minuuttia sen laskeuduttua Marsin pinnalle, mutta pysähtyi 14,5 sekunnin kuluttua.
Tekniset tiedot
- AMC-massa käynnistettäessä: 4625 kg [2]
- Rata-aseman massa laukaisuhetkellä: 3625 kg
- Laskeutumisajoneuvon massa laukaisuhetkellä: 1000 kg
- Laskeutuvan ajoneuvon massa saapuessaan Marsin ilmakehään: ei tietoa arvovaltaisista lähteistä
- Automaattisen Mars-aseman massa: 355 kg (pehmeän Marsiin laskeutumisen jälkeen)
Rakentaminen
AMS "Mars-3" kehitettiin S. A. Lavochkinin mukaan nimetyssä NPO :ssa , se koostui kiertorata-asemasta - keinotekoisesta satelliitista ja laskeutumisajoneuvosta automaattisella Marsin asemalla [2] . AMS:n asettelua ehdotti nuori suunnittelija V. A. Asyushkin. Ohjausjärjestelmän, joka painaa 167 kg ja tehonkulutus 800 wattia, on kehittänyt ja valmistanut Automaatio- ja instrumentointilaitos .
Rata-aseman perustana oli sylinterin muotoisen pääpropulsiojärjestelmän tankkilohko. Tähän lohkoon kiinnitettiin aurinkopaneelit , erittäin suunnattu parabolinen antenni, lämmönsäätöjärjestelmän lämpöpatterit , laskeutumisajoneuvo ja instrumenttiosasto . Mittarilokero oli toroidimainen sinetöity säiliö, jossa oli koneen tietokonejärjestelmä , navigointi- ja suuntausjärjestelmät sekä muut järjestelmät. Ulkopuolella astronavigaatioinstrumentit oli kiinnitetty instrumenttiosastoon.
Planeettojenvälinen asema on varustettu autonomisella avaruusnavigointijärjestelmällä, jolla ei ole analogeja maailmassa. Järjestelmässä käytettiin optista goniometriä. 7 tuntia ennen Marsiin saapumista laitteen piti tehdä ensimmäinen mittaus Marsin kulmapaikasta peruskoordinaatistoon nähden. Mittaustiedot välitettiin ohjausjärjestelmän ajotietokoneelle, joka laski kolmannen korjausvektorin, joka tarvitaan aseman siirtämiseen nimellisratalle. Laskelmien tulosten perusteella avaruusaluksen ohjausjärjestelmä antoi komennot suorittaa korjaus ilman Maan aiheuttamia häiriöitä. Ohjausjärjestelmän prototyyppi oli Kuun kiertorata-aluksen tietokonejärjestelmä, jonka ytimenä oli " Tropa " -tyyppisiin elementteihin perustuva S-530-ajotietokone [3] .
Laskeutumisajoneuvo oli kartiomainen aerodynaaminen jarruverkko , jonka halkaisija oli 3,2 metriä ja yläkulma 120 astetta ja joka peitti automaattisen Marsin aseman (lähes pallomainen). Automaattisen Marsin aseman päälle kiinnitettiin kiinnityshihnoilla toroidinen instrumentti-laskuvarjokontti, joka sisälsi pakoputket ja päälaskuvarjot sekä välineet, jotka ovat tarpeen vetäytymisen, vakautuksen, laskeutumisen Marsin kiertoradalta, jarrutuksen ja pehmeän kiertoradalta. lasku ja liitoskehys. Rungossa on kiinteää polttoainetta käyttävä moottori laskeutumisajoneuvon siirtämiseksi lentoradalta saapuvalle lentoradalle ja autonomisen ohjausjärjestelmän yksiköt laskeutuvan ajoneuvon vakauttamiseksi sen jälkeen, kun se on irrotettu kiertoradalta. Laskeutumisajoneuvon kyytiin kiinnitettiin myös viiri , jossa oli Neuvostoliiton valtion tunnuksen kuva . Ennen lentoa laskeutumisajoneuvo steriloitiin.
Automaattinen Marsin asema sisälsi ProOP -M-mönkijän .
Lento
Asema laukaistiin Baikonurin kosmodromista Proton -K- kantoraketilla, jossa oli lisäksi 4. vaihe - ylempi vaihe D 28. toukokuuta 1971 klo 18.26.30 Moskovan aikaa . Toisin kuin edellisen sukupolven AMS, Mars-3 laukaistiin ensin Maan keinotekoisen satelliitin väliradalle ja siirrettiin sitten planeettojen väliselle liikeradalle tehostuslohkolla D.
Lento Marsiin kesti yli 6 kuukautta. 8. kesäkuuta ja marraskuuta 1971 lentoradan korjaukset suoritettiin onnistuneesti. Marsin lähestymishetkeen asti lento eteni ohjelman mukaisesti. Aseman saapuminen planeetalle sattui suuren pölymyrskyn kanssa . Pölymyrsky alkoi 22. syyskuuta 1971 kirkkaalla Noachisin alueella eteläisellä pallonpuoliskolla. Syyskuun 29. päivään mennessä katettu kaksisataa pituusastetta Ausoniasta Thaumasiaan. 30. syyskuuta suljettiin etelänapa. Voimakas pölymyrsky esti Marsin pinnan tieteellisiä tutkimuksia keinotekoisista satelliiteista " Mars-2 ", "Mars-3", " Mariner-9 ". Vasta 10. tammikuuta 1972 pölymyrsky lakkasi ja Mars sai normaalin ulkonäön.
2. joulukuuta 1971 suoritettiin kolmas lentoradan korjaus. Korjaus tehtiin koneautomaatiolla ilman maatiloja. Aseman autonominen astroorientaatiojärjestelmä varmisti sen suunnan ja määritti aseman sijainnin suhteessa Marsiin. Saadut tiedot syötettiin automaattisesti ajotietokoneeseen, joka laski korjaavan pulssin suuruuden ja suunnan sekä antoi tarvittavat komennot korjausta varten. Kolmannen korjauksen jälkeen asema saapui lentoradalle, joka kulki 1500 km:n etäisyydellä Marsin pinnasta.
Mars 3 -laskuri teki maailman ensimmäisen pehmeän laskun Marsiin 2. joulukuuta 1971. Laskeutuminen alkoi planeettojen välisen lentoradan kolmannen korjauksen ja laskeutumisajoneuvon irrottamisen jälkeen kiertorata-asemalta. Ennen erotusta Mars-3-asema suunnattiin siten, että laskeutumisajoneuvo pääsi erotuksen jälkeen liikkumaan haluttuun suuntaan. Erotus tapahtui klo 12.14 Moskovan aikaa 2. joulukuuta, kun AMS lensi planeetalle, ennen kuin kiertorata-asema oli hidastumassa ja siirtymässä Mars-satelliitin kiertoradalle. 15 minuutin kuluttua laskeutuvan ajoneuvon kiinteää polttoainetta käyttävä moottori, joka siirtyi ohilentoradalta Marsin tapaamisrataan, aktivoitiin. Saatuaan lisänopeuden, joka oli 120 m/s (432 km/h), laskeutumisajoneuvo suuntasi arvioituun ilmakehän tulopisteeseen. Ristikkoon asennettu ohjausjärjestelmä sijoitti sitten laskeutumisajoneuvon kartiomaisella vastuskilvellä eteenpäin kulkusuunnassa varmistaakseen oikein suunnatun paluumatkan planeetan ilmakehään. Laskeutumisajoneuvon pitämiseksi tässä asennossa planeetan lennon aikana suoritettiin gyroskooppinen stabilointi. Laitteen pyöriminen pitkittäisakselia pitkin suoritettiin käyttämällä kahta pientä kiinteää polttoainetta käyttävää moottoria, jotka oli asennettu jarruseulan kehälle. Nyt tarpeettomat ohjausjärjestelmällä ja käännösmoottorilla varustettu ristikko erotettiin laskeutumisajoneuvosta.
Lento erotuksesta paluuseen kesti noin 4,5 tuntia. Ohjelma-aikalaitteen käskystä käynnistettiin myös kaksi muuta kiinteää polttoainetta käyttävää moottoria, jotka sijaitsevat myös jarruverkon reunalla, minkä jälkeen laskeutumisajoneuvon pyöriminen pysähtyi. Kello 16.44 laskeutumisajoneuvo saapui ilmakehään lähellä laskettua kulmassa noin 5,8 km/s nopeudella ja aerodynaaminen jarrutus alkoi. Aerodynaamisen jarrutusosan lopussa, edelleen yliääninopeudella, ylikuormitusanturin komennolla, ohjaajan kourun kannessa sijaitsevan jauhemoottorin avulla, otettiin käyttöön ohjaajan kouru. 1,5:n kuluttua pidennetyn latauksen avulla torus-laskuvarjoosasto leikattiin ja osaston yläosa (kansi) otettiin pois laskeutumisajoneuvosta pilottikourulla. Kansi puolestaan esitteli päälaskuvarjon riuttakuvulla. Päälaskuvarjon linjat kiinnitettiin joukkoon kiinteää polttoainetta käyttäviä moottoreita, jotka oli jo kiinnitetty suoraan laskeutumisajoneuvoon.
Kun laite hidastui transoniseen nopeuteen, aikaohjelmalaitteen signaalista suoritettiin riutta - päälaskuvarjon kuomu avattiin kokonaan. 1–2 sekunnin kuluttua aerodynaaminen kartio pudotettiin ja pehmeän laskujärjestelmän radiokorkeusmittarin antennit avautuivat. Laskuvarjolla useiden minuuttien aikana liikkeen nopeus laski noin 60 m/s (216 km/h). 20-30 metrin korkeudessa radiokorkeusmittarin käskystä käynnistettiin pehmeän laskun jarrutusmoottori. Laskuvarjo ohjattiin tällä hetkellä sivuun toisella rakettimoottorilla, jotta sen kupoli ei peittäisi automaattista Marsin asemaa. Jonkin ajan kuluttua pehmeän laskun moottori sammui ja laskuvarjokontista erotettu laskeutumisajoneuvo upposi pintaan. Samanaikaisesti laskuvarjokontti, jossa oli pehmeä laskumoottori, ohjattiin sivulle matalatehoisten moottoreiden avulla. Laskeutumishetkellä paksu vaahtopinnoite suojasi asemaa iskukuormitukselta. Laskeutuminen suoritettiin Electris- ja Phaetontia-alueiden välillä. Laskeutumispisteen koordinaatit 45° S. sh. 158°W / 45 / -45; -158° S sh. 158°W suuren kraatterin Ptolemaios tasaisella pohjalla, Reutovin kraatterin länsipuolella ja pienten Belev- ja Tyuratam-kraatterien välissä [4] .
Pehmeä laskeutuminen Marsiin on monimutkainen tieteellinen ja tekninen ongelma. Mars-3-aseman kehittämisen aikana Marsin pinnan kohokuviota tutkittiin huonosti, maaperästä oli hyvin vähän tietoa. Lisäksi ilmapiiri on hyvin harvinainen, voimakkaat tuulet ovat mahdollisia. Aerodynaamisen kartion, laskuvarjojen ja pehmeän laskun moottorin suunnittelu valittiin ottaen huomioon toiminta useissa mahdollisissa laskeutumisolosuhteissa ja Marsin ilmakehän ominaisuudet, ja niiden paino on minimaalinen.
Automaattinen Marsin asema valmistautui työhön 1,5 minuutin kuluessa laskeutumisen jälkeen ja alkoi lähettää panoraamakuvaa ympäröivästä pinnasta, mutta 14,5 sekunnin kuluttua lähetys pysähtyi. AMS lähetti vain ensimmäiset 79 riviä valokuvatelevisiosignaalista (panoraaman oikea reuna). Tuloksena oleva kuva oli kaoottisesti järjestettyjä valkoisia, harmaita ja mustia raitoja, joista ei paljastunut yhtään yksityiskohtaa.
Myöhemmin oletettiin erilaisia syitä signaalin äkilliseen päättymiseen pinnalta: vaarallinen vaakanopeus laskeutumisen aikana (Mars-3 tuli ilmakehään planeetan pölymyrskyn aikana, kun tuulen nopeus lähellä pintaa, Mariner-9:n mukaan, oli yli 140 metriä sekunnissa [5] ), koronapurkaus lähettimien antenneissa voimakkaan pölymyrskyn vuoksi [6] , akun vaurioituminen.
Rata-asema suoritti laskeutumisajoneuvon irrottamisen jälkeen hidastuksen 2. joulukuuta 1971 ja astui Marsin keinotekoisen satelliitin suunnittelusta poikkeavalle kiertoradalle, jonka kiertoaika oli 12 päivää 16 tuntia 3 minuuttia (kiertorata, jolla on kiertoaika). suunniteltu 25 tuntia). Viranomaisista lähteistä ei ole tietoa syistä, jotka joutuivat suunnittelun ulkopuoliselle kiertoradalle. Myöhemmin oletettiin useita syitä: riittämättömästi testattu ohjelmisto, joten moottorin toiminta-aika jarrutuksen aikana osoittautui laskettua pienemmäksi, lisääntynyt polttoaineenkulutus lentoradan korjausten aikana kantoraketin epänormaalin toiminnan vuoksi.
23. elokuuta 1972 TASS ilmoitti lento-ohjelman valmistumisesta. "Asema on toteuttanut kattavaa Marsin tutkimusohjelmaa yli 8 kuukauden ajan. Tänä aikana asema teki 20 kierrosta planeetan ympäri. AMS jatkoi tutkimusta orientointi- ja stabilointijärjestelmän typen loppumiseen asti.
Vuonna 2002 Space Research -lehdessä julkaistiin artikkeli, jossa todettiin seuraavaa Mars-3:n työstä Marsin kiertoradalla: "Infrapunaradiometria, fotometria, ilmakehän koostumuksen, magneettikentän ja plasman mittaukset suoritettiin neljä kuukautta” [7 ] .
Valokuvatelevisioinstallaation (FTU) kehittäjät käyttivät väärää Mars-mallia, minkä vuoksi valittiin väärät valotukset. Kuvista tuli ylivalotettuja, lähes täysin käyttökelvottomia. Useiden kuvasarjojen jälkeen (jokaisessa 12 kehystä) valokuvatelevisio-installaatiota ei käytetty [2] .
Patentinarviointilaite
ProOP-M on maailman ensimmäinen rover. Tarkoitus - maaperän tiheyden mittaus. Viiden vuoden aikana 150 henkilöä työskenteli laitteen parissa VNIITransmashissa , jota johti suunnittelija Alexander Leonovich Kemurdzhian . Samat ProOP-M-kulkijat olivat osa automaattisia Marsin asemia, jotka toimitettiin Marsin pinnalle vuonna 1971 Neuvostoliiton planeettojenvälisten asemien Mars-2 ja Mars-3 laskeutumisajoneuvoilla. Mars 2 -laskuri syöksyi maahan laskeutumisen yhteydessä. Mars 3 -laskuri teki pehmeän laskun 2. joulukuuta 1971, mutta signaali Mars-asemalta katosi 14,5 sekunnin kuluttua. Tietoja roverista ei saatu.
Laskeutumispaikan löytäminen
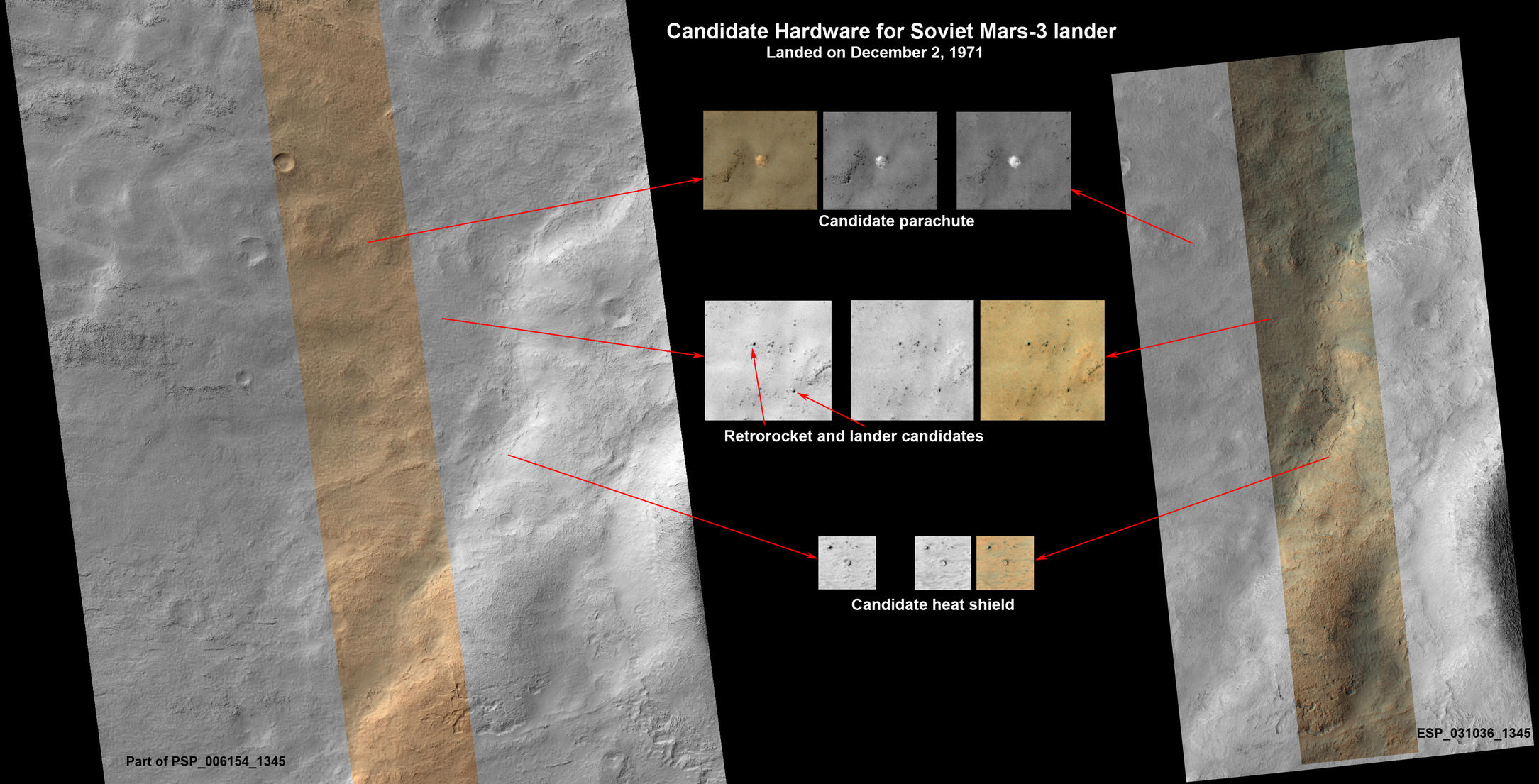
Osana Mars Reconnaissance Orbiter -lentoohjelmaa yritettiin löytää Mars-3-laitteen laskeutumispaikka, samoin kuin muitakin marsilaisia automaattiasemia, jotka ihmiskunta laukaisi 1900-luvulla. Asemaa ei pitkään aikaan löytynyt odotetuista laskeutumiskoordinaateista. Vuosina 2012-2013 avaruusharrastajat tarkastelivat ja analysoivat visuaalisesti ja analysoivat korkearesoluutioisia kuvia aseman suunnitellusta laskeutumisvyöhykkeestä, jotka otettiin vuonna 2007 Mars Reconnaissance Orbiter -satelliitilla [8] . Tämän seurauksena tunnistettiin esineitä, jotka ovat Mars-3-laskeutumisajoneuvon elementtejä. Kuvista tunnistettiin automaattinen Mars-asema, laskuvarjo, pehmeän laskun moottori ja aerodynaaminen vastuskilpi. Heidän etsinnässään auttoivat NASA :n , GEOKHI :n , RKS :n ja NPO:n asiantuntijat. Lavochkin [1] [9] [10] [11]
Vertailu AMS Mariner 9 :ään
- Maaperän lämpösäteilyä, jolla sen rakenne määritettiin, ei tutkittu vain infrapunassa, vaan (toisin kuin Mariner-9) ja radioalueella [12] .
- Marsin globaaleja fotometrisiä profiileja on saatu monilta spektrialueilta. Mariner 9 ei tehnyt tällaisia mittauksia [12] .
- Ilmakehän vesipitoisuus määritettiin. Mittaustekniikassa käytettiin spektrin aluetta, jossa heijastunut auringon säteily hallitsee lämpösäteilyn sijaan, ja kaistan intensiteetti on lähes riippumaton pystysuuntaisesta lämpötilajakaumasta. Tällainen tekniikka on periaatteessa täydellisempi kuin Mariner-9:ssä käytetty tekniikka [12] .
Robottiasemien laskeutumispaikat Marsissa

![]()
![]()
Katso myös
- " Mars 1971C " on Neuvostoliiton M-71-sarjan neljännen sukupolven automaattinen planeettojenvälinen asema, joka on suunniteltu tutkimaan Marsia keinotekoisen satelliitin kiertoradalta.
- " Mars-2 " on neljännen sukupolven Neuvostoliiton AMS M-71-sarjasta, joka on suunniteltu tutkimaan Marsia sekä keinotekoiselta satelliitilta että suoraan planeetan pinnalla.
Muistiinpanot
- ↑ 1 2 Neuvostoliiton kosmonautikan ylpeys löydettiin Marsista . Haettu 26. kesäkuuta 2020. Arkistoitu alkuperäisestä 28. syyskuuta 2016.
- ↑ 1 2 3 Mars -71 (Mars-2 ja Mars-3) (pääsemätön linkki) . kansalaisjärjestön verkkosivut Lavochkin. Haettu 17. helmikuuta 2014. Arkistoitu alkuperäisestä 10. toukokuuta 2013.
- ↑ A. G. Glazkov Space Odyssey ajotietokone S-530 XXXVIII Avaruustutkimuksen akateemiset lukemat, jotka on omistettu akateemikko S. P. Korolevin ja muiden merkittävien tiedemiesten muistolle - avaruustutkimuksen pioneereja 2014 s. 115 Arkistoitu 15. huhtikuuta 2015 Wayback Machinessa .
- ↑ Kahden venäläisen kaupungin nimet ilmestyivät Marsin kartalle | RIA Novosti Arkistoitu 9. elokuuta 2013 Wayback Machinessa .
- ↑ Carl Sagan. Kosmos: universumin, elämän ja sivilisaation kehitys / Per. englannista. A. G. Sergeeva. - Pietari. : Amphora, 2008. - 368 s. — (Dynastiasäätiön kirjasto). — ISBN 978-5367008296 .
- ↑ Perminov, 2018 .
- ↑ V. I. Moroz, V. T. Huntress, I. L. Shevalev. XX vuosisadan planeettojen tutkimusmatkat // Avaruustutkimus: lehti. - 2002. - T. 40 , nro 5 . - S. 451-481 . — ISSN 0023-4206 .
- ↑ Vitali Jegorov. Kuinka etsimme Mars-3:a . Habrahabr (11. huhtikuuta 2013). Haettu 11. huhtikuuta 2013. Arkistoitu alkuperäisestä 17. huhtikuuta 2013.
- ↑ Guy Webster. NASA Mars Orbiter Images May Show 1971 Soviet Lander (englanniksi) (linkki ei saatavilla) . NASA (11. huhtikuuta 2013). Haettu 11. huhtikuuta 2013. Arkistoitu alkuperäisestä 17. huhtikuuta 2013.
- ↑ NASA Mars Orbiter Images May Show 1971 Neuvostoliiton Lander . Haettu 2. tammikuuta 2020. Arkistoitu alkuperäisestä 17. huhtikuuta 2019.
- ↑ 1 2 Webster, Guy NASA Mars Orbiter -kuvia toukokuussa 1971 Neuvostoliiton Lander . NASA (11. huhtikuuta 2013). Haettu 12. huhtikuuta 2013. Arkistoitu alkuperäisestä 29. kesäkuuta 2017.
- ↑ 1 2 3 Uutta Marsista. - M .: Mir, 1974.
{kind=link}
{kind=link}
Kirjallisuus
- V. Smirnov. Signaali Marsista. Raportti Center for Deep Space Communicationsilta . Totuus (8. joulukuuta 1971). Haettu: 12. joulukuuta 2016.
- V. Moroz, L. Xanfomality. Neljä kuukautta Marsin kiertoradalla // Neuvostoliiton tiedeakatemian tiedote: lehti. - 1972. - S. 10-25 .
- Uutta Marsista. - M .: Mir, 1974.
- Bronshten V. A. Mars-planeetta. - M .: Nauka, 1977.
- VG Perminov. The Difficult Road to Mars : A Brief History of Mars Exploration in the Soviet Union: [ eng. ] . - Franklin Classics Trade Press, 2018. - 86 s. — ISBN 0353299626 . — ISBN 978-0353299627 .
- Marov M.Ya, Huntress W.T. Neuvostoliiton robotit aurinkokunnassa: teknologiat ja löydöt: [ rus. ] . - M. : Fizmatlit, 2017. - 611 s. — ISBN 978-5-9221-1741-8 .
Linkit
- Neuvostoliiton hyökkäys Marsiin (1971 - "Mars-2" ja "Mars-3"). YouTubessa _
- AMC-sarja M-71 verkkosivuilla NPO niitä. Lavochkin
- Mars 3 NASAn verkkosivuilla
- Epävirallinen flash-elokuva Mars-3-lennosta
- Lyhyt kuvaus Mars-2:n, Mars-3:n suunnittelusta ja lennosta
- Kuvaus Mars-2:n, Mars-3:n suunnittelusta ja lennosta
- [bse.sci-lib.com/particle015942.html Kuva Mars-3:sta suuressa Neuvostoliiton tietosanakirjassa]
- Voisiko tämä olla Neuvostoliiton laskeutumisluotain Mars-3?
- Löytyikö "Mars-3"?!, Etsi Neuvostoliiton laskeutujia Marsista
| Marsin tutkimus avaruusaluksilla | |
|---|---|
| Lentäminen | |
| Orbital | |
| Lasku | |
| roverit | |
| Marshalls | |
| Suunniteltu |
|
| Ehdotettu |
|
| Epäonnistui |
|
| Peruutettu |
|
| Katso myös | |
| Aktiiviset avaruusalukset on korostettu lihavoidulla | |
| |
|---|---|
|
| |
| Yhdellä raketilla laukaistut ajoneuvot erotetaan toisistaan pilkulla ( , ), laukaisut välipisteellä ( · ). Miehitetyt lennot on korostettu lihavoidulla. Epäonnistuneet käynnistykset on merkitty kursiivilla. | |